При подготовке к высадке в Северной Африке, в 1942 году, американские военные задались вопросом ориентации. В смысле, как ориентироваться там, где никаких ориентиров нет? Как вести разведку там, где днем скрытно передвигаться нереально, потому что укрыться негде, а ночью сложно потому, что ничего не видно? Результатом очень масштабных НИОКР стал прототип разведывательной машины на базе танка Шерман M4A1.
ПНВ, установленный вместо стандартного перископа
Разведывать, как вы понимаете, предполагалось только ночью, для чего машину оснастили системой инфракрасного наблюдения (разумеется, с мощной подсветкой). За подсветку отвечали четыре курсовых по 450 ватт мощностью и одна поворачивающаяся фара на 600 ватт с черным светофильтром. Уже одно это потребовало замены штатного генератора, мощностью 1,5кВт на изделие, мощностью 5кВт, для чего пришлось перекомпоновывать еще и топливную аппаратуру (что уже делало переоборудование серийных машин в войсках нереальным).
Собственно, сам ПНВ, довольно компактный, как видите
Для реализации данных этой подсветки использовались устройства, устанавливаемых вместо штатных перископов в люках. Дальше картинка передавалась на запитанный напряжением 5000 вольт фотоумножитель, рисующий картинку на крохотном экране. Картинка была так себе, не спасало даже наблюдение через систему линз и шторок. Яркость, доступная на тот момент в довольно компактном приборе была совершенно недостаточной.
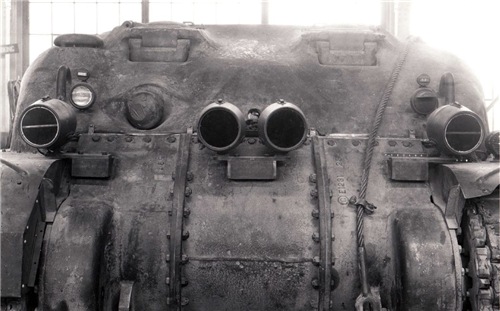
Корпус разведывательной машины с четырьмя ИК фарами курсовой подсветки
Даже минимальная засветка глаз мехвода и командира ослепляли их на несколько минут. Пришлось даже заменить внутреннюю подсветку в танке на ультрафиолетовую, а значимые индикаторы и переключатели покрасить и подписать специальной флуоресцентной краской, едва светящейся под ультрафиолетовыми лучами в полной темноте. Вести же записи было, как вы понимаете, невозможно.
Компас с оптической системой отслеживания положения стрелки
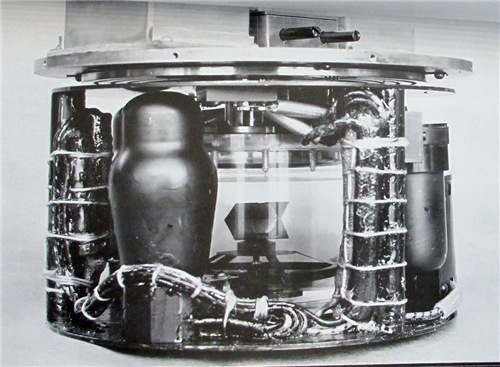
Интересно решили проблему ориентации (ну как сказать, «решили»… Попытались): испытания проходили два варианта одографов, один от компании Monroe Calculating Machine Company второй от International Business Machines (IBM, ага), причем, аппарат IBM позволял еще и масштабы карты переключать. Однако, несмотря на всю хитроумность примененных решений на основе учета данных компаса и одометра, устройства не показали способности более-менее точно определять местоположение машины через некоторое время после начала движения.
Одограф от IBM, с переключателем масштаба карты
Начиналось-то все неплохо, но с каждой минутой и милей ошибка нарастала до полного обессмысливания результатов. Тут сыграли свою роль и недостаточно точные датчики положения стрелки компаса, и приблизительность показаний одометра на маневрирующей гусеничной машине, и помехи разного рода, вносившие свою лепту в положение стрелки компаса. Это была, все-таки, попытка прыгнуть выше головы.
Мы используем файлы cookie на нашем веб-сайте, чтобы предоставить вам наиболее актуальный опыт, запоминая ваши предпочтения и повторные посещения. Нажимая «Принять все», вы соглашаетесь на использование ВСЕХ файлов cookie. Однако вы можете посетить «Настройки файлов cookie», чтобы предоставить контролируемое согласие.
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. These cookies ensure basic functionalities and security features of the website, anonymously.
Cookie
Duration
Description
cookielawinfo-checkbox-analytics
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Analytics".
cookielawinfo-checkbox-functional
11 months
The cookie is set by GDPR cookie consent to record the user consent for the cookies in the category "Functional".
cookielawinfo-checkbox-necessary
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookies is used to store the user consent for the cookies in the category "Necessary".
cookielawinfo-checkbox-others
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Other.
cookielawinfo-checkbox-performance
11 months
This cookie is set by GDPR Cookie Consent plugin. The cookie is used to store the user consent for the cookies in the category "Performance".
viewed_cookie_policy
11 months
The cookie is set by the GDPR Cookie Consent plugin and is used to store whether or not user has consented to the use of cookies. It does not store any personal data.
Functional cookies help to perform certain functionalities like sharing the content of the website on social media platforms, collect feedbacks, and other third-party features.
Performance cookies are used to understand and analyze the key performance indexes of the website which helps in delivering a better user experience for the visitors.
Analytical cookies are used to understand how visitors interact with the website. These cookies help provide information on metrics the number of visitors, bounce rate, traffic source, etc.
Advertisement cookies are used to provide visitors with relevant ads and marketing campaigns. These cookies track visitors across websites and collect information to provide customized ads.